Speaker
Description
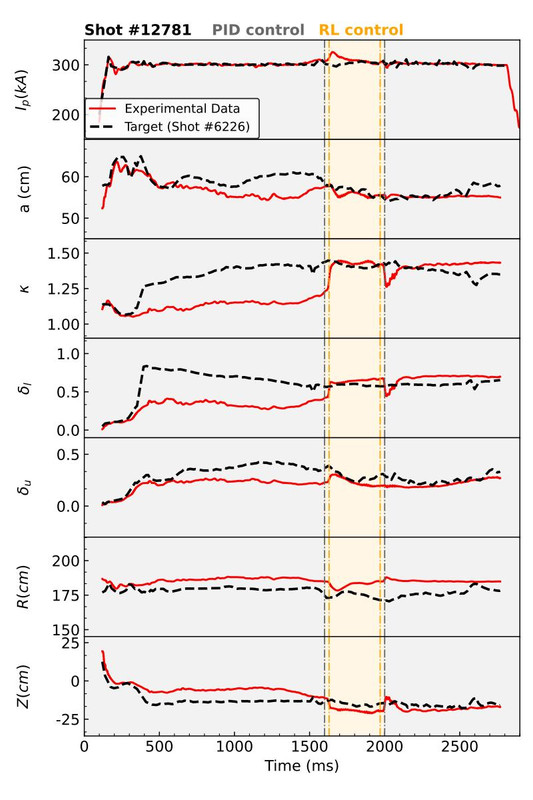
In magnetic confinement fusion, precise control of plasma dynamics and shape is essential for stable operation. We present two complementary developments toward real‑time, intelligent control on the HL‑3 tokamak. First, we build a high‑fidelity, fully data‑driven dynamics model to accelerate reinforcement learning (RL)–based trajectory control. By addressing compounding errors inherent to autoregressive simulation, our model achieves accurate long‑term predictions of plasma current and last closed flux surface. Coupled with the EFITNN surrogate for magnetic equilibrium reconstruction, the RL agent learns within minutes to issue magnetic coil commands at $1$ kHz, sustaining a $400$ ms control horizon with engineering‑level waveform tracking. The agent also demonstrates zero‑shot adaptation to new triangularity targets, confirming the robustness of the learned dynamics.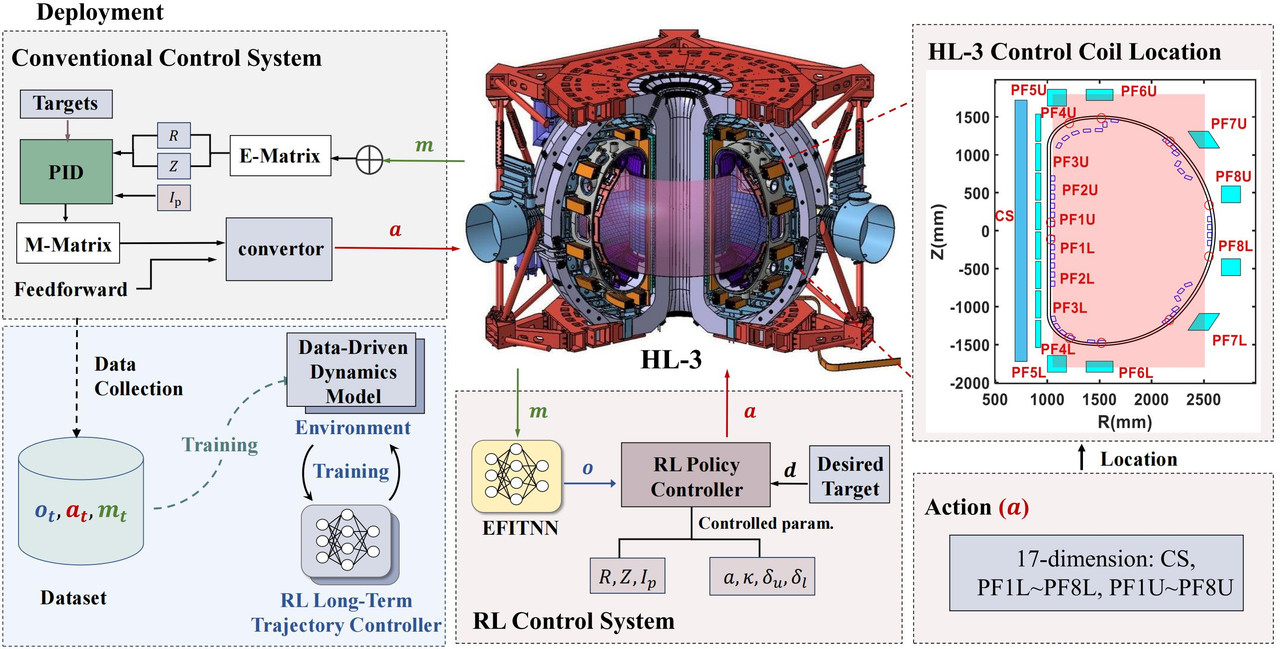
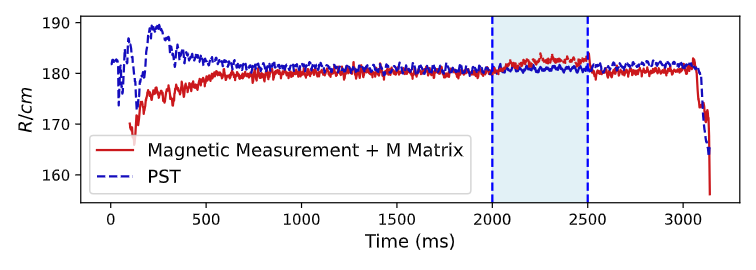
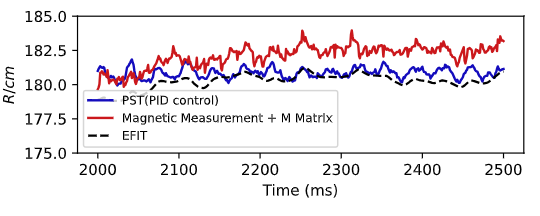
Second, we develop a non‑magnetic, vision based method for real‑time plasma shape detection. We adapt the Swin Transformer into a Poolformer Swin Transformer (PST) that interprets CCD camera images to infer six shape parameters under visual interference, without manual labeling. Through multi‑task learning and knowledge distillation, PST estimates the radial and vertical positions ($R$ and $Z$) with mean average errors below $1.1$ cm and $1.8$ cm, respectively, in under $2$ ms per frame—an $80$ percent speed gain over the smallest standard Swin model. Deployed via TensorRT, PST enables a $500 $ms stable PID feedback loop based on image‑computed horizontal displacement.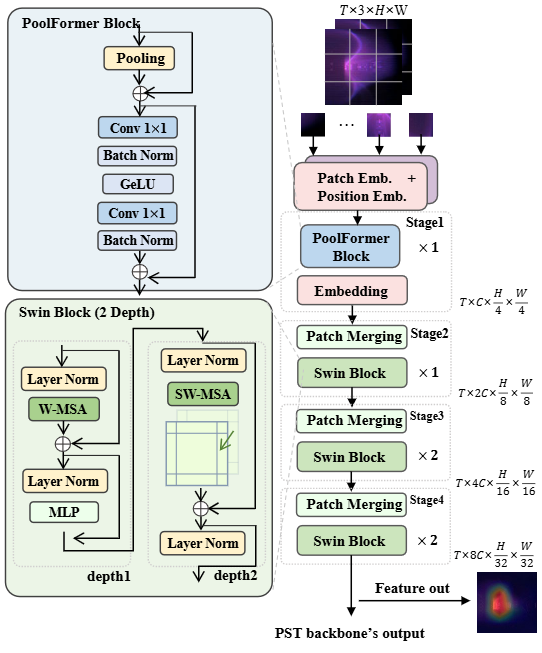
Together, these two streams lay the groundwork for a fully closed‑loop, vision‑informed RL control system. Although each module has been tested on its own, the next step is to link real‑time shape feedback with the RL‑trained coil actuator policy to enable continuous, model‑based control with minimal reliance on magnetic probes.
| Speaker's email address | lirongpeng@zju.edu.cn |
|---|---|
| Speaker's Affiliation | Zhejiang university |
| Member State or International Organizations | China |
